本文将会介绍Kinect V2怎样在Ubuntu上进行配置。
首先我们针对的是Kinect的第二代产品,与一代产品有着明显的不同,所以不用担心会认错。

1、安装libfreenect2
因为官方没有给出Kinect v2在Linux系统上的驱动,所以我们需要自己下载开源的驱动,好在已经有大神们把这些驱动写好了(这里膜拜一下这些人)。
下载地址是https://github.com/OpenKinect/libfreenect2。
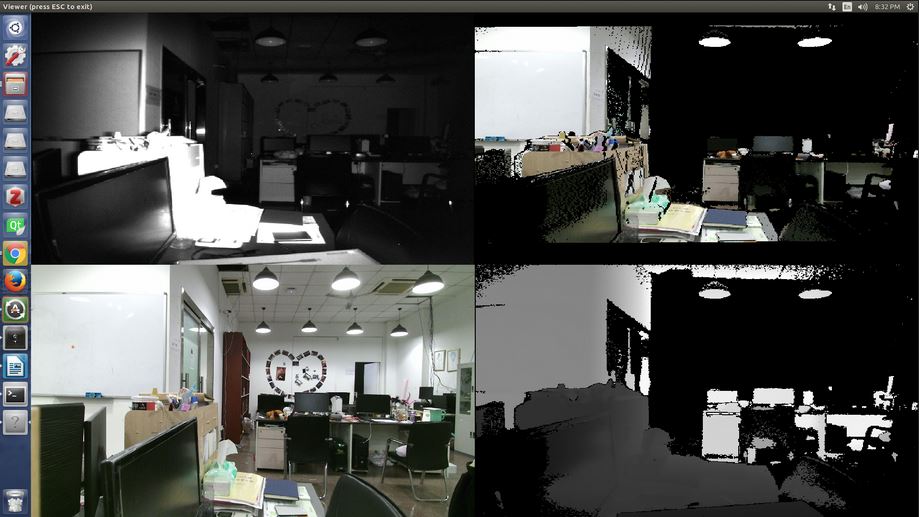
注意libfreenect2 仅仅针对2代kinect,一代的kinect需要libfreenect1。libfreenect2支持RGB图像传输、红外和深度图传输、RGB图像和深度图像注册。
USB 3.0接口是必要的。如果没有,将会导致kinect连接失败。
我们采用ubuntu 14.04做实验,主要的安装过程如下:
(1)先转到你准备存放libfreenect2的目录,下载libfreenect2的源代码
git clone https://github.com/OpenKinect/libfreenect2.git
cd libfreenect2
(2)安装必要的package
cd depends
./download_debs_trusty.sh
sudo apt-get install build-essential cmake pkg-config
sudo dpkg -i debs/libusb*deb
sudo apt-get install libturbojpeg libjpeg-turbo8-dev
sudo dpkg -i debs/libglfw3*deb; sudo apt-get install -f; sudo apt-get install libgl1-mesa-dri-lts-vivid (如果最后一个库与其他包存在冲突,可以不安装它)
还有一些可选的组件,如果要安装可以参照官网教程。
(3)编译安装
cd ..
mkdir build && cd build
cmake .. -DCMAKE_INSTALL_PREFIX=$HOME/freenect2 -DENABLE_CXX11=ON
make
make install
如果有基于CMake的第三方应用想要找到libfreenect2,你需要在编译你的工程时指定cmake的编译选项
cmake -Dfreenect2_DIR=$HOME/freenect2/lib/cmake/freenect2
(4)设置设备访问规则,然后重新连接硬件。
sudo cp ../platform/linux/udev/90-kinect2.rules /etc/udev/rules.d/
(5)运行测试程序。
./bin/Protonect
2、ROS接口的安装
2.1、首先需要安装ROS(indigo版本)
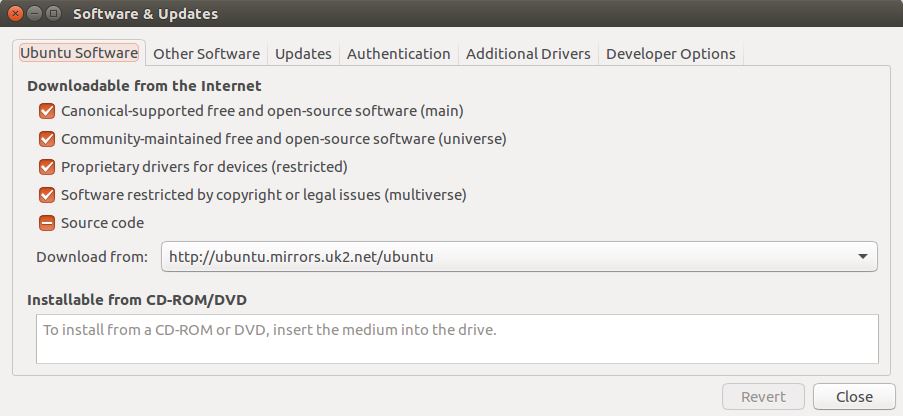
(1)配置ubuntu的软件仓库允许restricted, universe和multiverse三种。
(2)设置下载源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
(3)设置Keys
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net --recv-key 0xB01FA116
如果遇到gpg: keyserver timed out 错误,可以尝试下面的命令
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
(4)安装
sudo apt-get update
注意,如果你使用的是Ubuntu Trusty 14.04.2,出现依赖问题,可以尝试下面命令来解决。
sudo apt-get install libgl1-mesa-dev-lts-utopic
ROS有很多的库可以使用,推荐初学者完全安装,以备以后学习。
桌面完整版安装:(推荐)包含ROS、rqt、rviz、通用机器人函数库、2D/3D仿真器、导航以及2D/3D感知功能。
sudo apt-get install ros-indigo-desktop-full
(5)初始化 rosdep
sudo rosdep init
rosdep update
(6)环境变量设置
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc
(7)获得rosinstall
rosinstall是一个在ROS中常用的命令行工具,但是它是独立于ROS发布的。
sudo apt-get install python-rosinstall
(8)设置ROS工作区
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
尽管工作空间刚创建时空的,我们仍然可以build工作区
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
请确认环境变量ROS_PACKAGE_PATH包含你所在的目录
echo $ROS_PACKAGE_PATH
/home/youruser/catkin_ws/src:/opt/ros/kinetic/share:/opt/ros/kinetic/stacks
2.2、安装iai_kinect2
(1)对于已经安装Ros Indigo的Ubuntu14.04来说,可以开始安装iai_kinect2了。iai_kinect2是一个工具和库的集合,有了它ROS就可以使用Kinect了。
cd ~/catkin_ws/src/
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths .
cd ~/catkin_ws
catkin_make -DCMAKE_BUILD_TYPE="Release"
注意,如果你的libfreenect2没有安装在$HOME/freenect2下,你就需要为在catkin_make后添加-Dfreenect2_DIR=path_to_freenect2/lib/cmake/freenect2来指定路径。
(2)连接传感器
roslaunch kinect2_bridge kinect2_bridge.launch
(3)标定步骤
Kinect需要进行标定,这样可以提升RGB和深度图的匹配效果。请参考以下网址
https://github.com/code-iai/iai_kinect2/tree/master/kinect2_calibration#calibrating-the-kinect-one
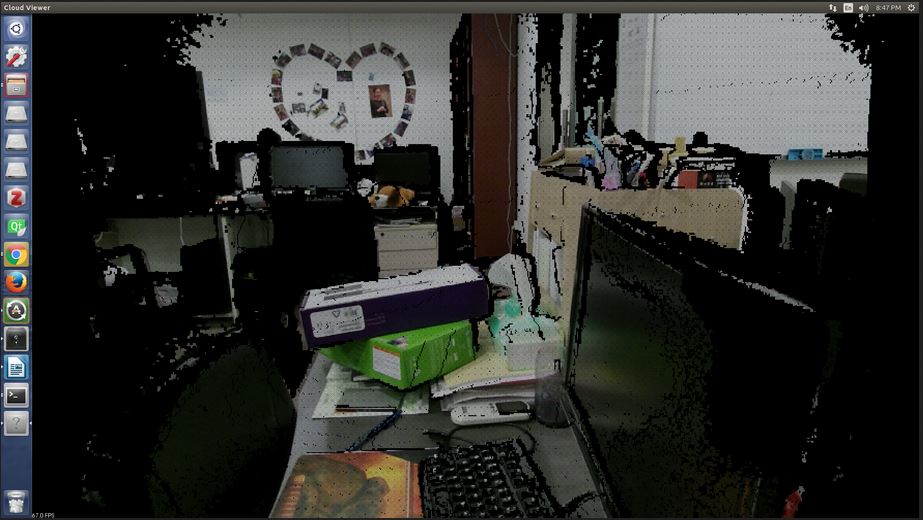
(4)重新启动kinect2_bridge,然后观看结果
rosrun kinect2_viewer kinect2_viewer kinect2 sd cloud